Control N1
Conoce el Control N1. Nuestro módulo AutoPilot más pequeño, liviano y versátil. Con tan solo 17.6mm × 28mm y 2.3g, este pequeño gran módulo ofrece control de vuelo completo con ArduPilot y PX4 incluso en los diseños más restringidos en espacio y peso, manteniéndose como una solución de bajo costo.
Características principales
Sección titulada «Características principales»- Ultra-Compacto y Ultraligero - Apenas más grande que un sello — 17.6×28mm y menos de 2.7g —, el CN1 se integra en UAVs pequeños, ROVs, UUVs y plataformas de robótica personalizadas sin compromisos.
- Núcleo de Alto Rendimiento - Impulsado por un MCU STM32H7, ofrece la potencia de procesamiento necesaria para vuelo estabilizado, planificación avanzada de misiones y fusión de sensores en tiempo real, reservando más del 50% de su capacidad de cómputo para mejoras futuras y aplicaciones personalizadas.
- Diseño de una sola cara - Hemos diseñado el autopiloto completo en un PCB de una sola cara, minimizando el área y la complejidad de la placa para una fabricación sencilla, tiempos de entrega más rápidos y menor costo. La simplicidad aumenta la robustez (“la mejor pieza es ninguna pieza”), reduciendo puntos de falla potenciales y mejorando la confiabilidad.
- Interfaz Board-to-Board Flexible y Preparada para el Futuro - Diseñado con el futuro en mente, nuestro footprint de placa —similar al tipo de conector Raspberry Pi CM5— expone pines de señal adicionales para que puedas crear futuras tarjetas controladoras personalizadas, no solo portadoras; en otras palabras, puedes reutilizar todas tus tarjetas portadoras/principales existentes y actualizarlas progresivamente a tu propio ritmo.
- Selección de Sensores Probada en Campo - No elegimos componentes solo en papel. A través de extensas pruebas de campo y experiencia, seleccionamos cuidadosamente solo los mejores sensores. Espera un rendimiento tan por delante de la curva que los competidores seguirán nuestro liderazgo.
- Excelencia Asequible, Fabricada en EE.UU. - Orgullosamente diseñado y fabricado en EE.UU., el CN1 supera en precio a competidores más voluminosos, pesados y costosos, mientras ofrece características premium de control de vuelo — y no recortamos costos donde la gente no puede ver; solo usamos marcas de componentes pasivos y activos de reputación como Murata, STMicro, Texas Instruments, NXP y más.
- Ecosistema Open-Source - Como nuestra tradición central, ofrecemos compatibilidad total con las comunidades ArduPilot y PX4, lo que significa acceso instantáneo a firmware maduro, herramientas de planificación de misiones y soporte global.
Vista 3D
Sección titulada «Vista 3D»Especificaciones
Sección titulada «Especificaciones»General
Sección titulada «General»| Autopiloto | Control N1 |
|---|---|
| Procesador principal | STMicro® STM32H743 Núcleo Arm® Cortex®-M7, FPU de doble precisión hasta 480 MHz fCPU |
| Caché L1 | 16 Kbytes de I-caché 16 Kbytes de D-caché |
| RAM | 1 MB |
| Flash | 2 MB |
| Memoria | 8 MB |
| Sensores | 2x Acelerómetro/Giroscopio 1x Magnetómetro 1x Barómetro |
| Sensor Inercial | 2x InvenSense IIM-42653 (6DoF) |
| Magnetómetro | Asahi Kasei Micro AK09940A |
| Barómetro | Barómetro Infineon DPS368 |
| Interfaces y puertos | Nº de instancias y capacidades |
|---|---|
| Salidas de motor | 12x PWM, DShot (BIDIR), GPIO |
| Serial | 7x total 3 full-duplex con control de flujo 4 full-duplex |
| CAN | 2x FD-CAN (hasta 8 Mbps) |
| I2C | 2x Modo rápido (hasta 400kHz) |
| SPI | 1x Hasta 40 MHz de velocidad CLK Una línea CS dedicada, GPIOs disponibles como CS extra |
| GPIO | 4x Push-Pull directo desde MCU |
| USB | 1x USB Full Speed Puerto nativo MCU STM32H7 |
| SDIO/SDMMC | 1x Interfaz SDMMC Compartida con socket |
| LED Direccionable | 1x Pin del LED integrado (encadenable) |
| Debug | 1x Líneas Serial Wire Debug (SWD) disponibles Pin BOOT0 disponible |
Mecánico
Sección titulada «Mecánico»| Parámetro | Valor |
|---|---|
| Dimensiones horizontales | 28 mm x 17.6mm 1.102” x 0.693” |
| Altura | 3.7 mm 0.145” |
| Peso | 2.32 g 0.082 oz |
| Conectores | Amphenol® BergStak® serie |
| Altura de ensamble acoplado | 4.5 mm 0.177” |
Eléctrico
Sección titulada «Eléctrico»| Parámetro | Valor o rango |
|---|---|
| Tensión de entrada (VDD) | 4.8 V - 6.0 V |
| Consumo de corriente típico | ~230 mA |
| Temperatura de operación | -20 - 75 C [TBC] |
| Temperatura de almacenamiento | -40 - 85 C |
Dibujo 2D
Sección titulada «Dibujo 2D»Una descripción de la ubicación de los conectores de la placa se muestra en el siguiente dibujo. Una versión en PDF está disponible en la sección de descargas.
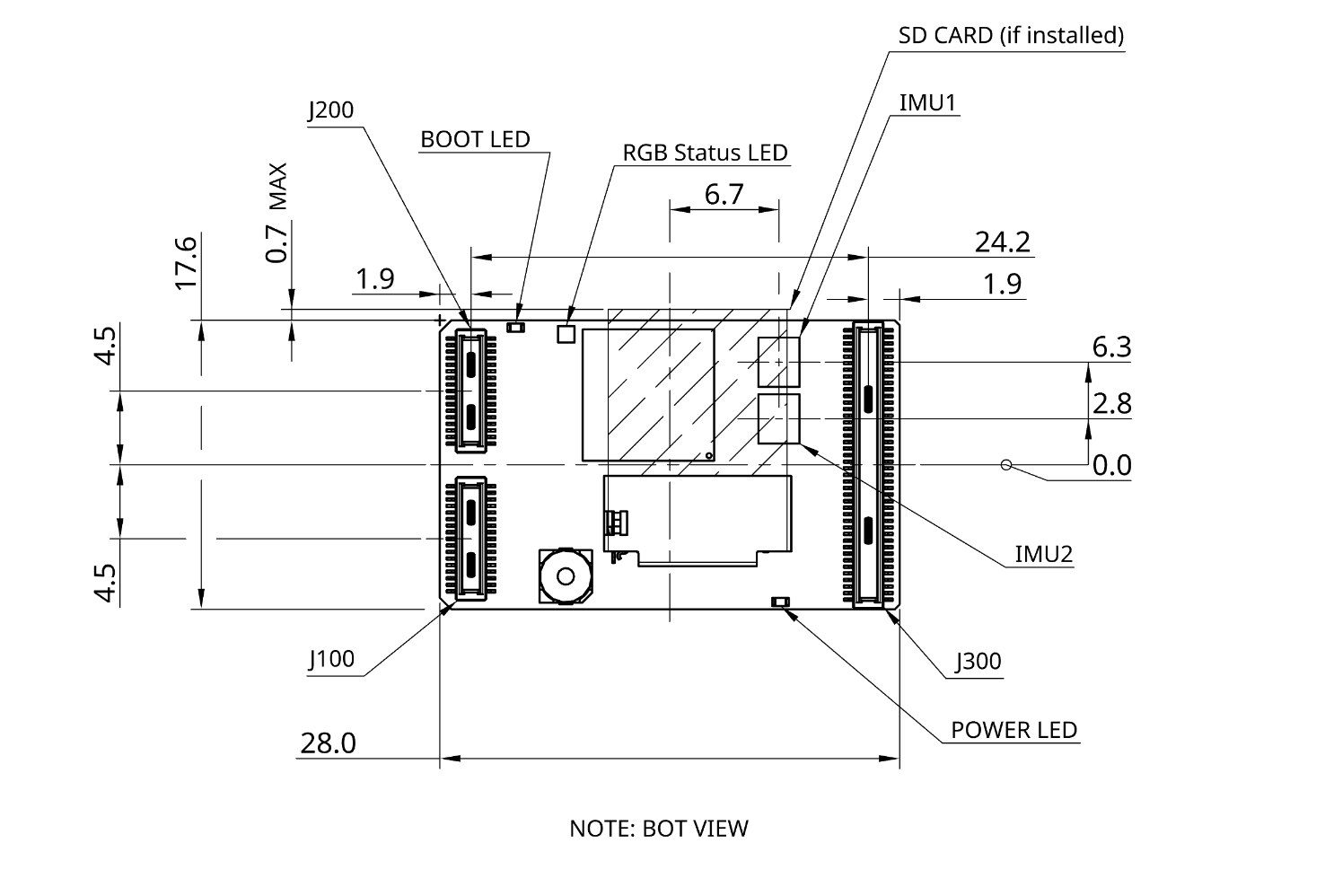
El Control N1 utiliza una nueva especificación de socket que comprende 140 pines divididos en 3 conectores tipo DF40 (Hirose). Nos comprometemos a dar soporte a este footprint en versiones futuras.
| Referencia | Nº de pines | Número de parte | PN alternativo |
|---|---|---|---|
| J100 | 30 | DF40HC(3.5)-30DS-0.4V(51) | 10164227-0305A1RLF |
| J200 | 30 | DF40HC(3.5)-30DS-0.4V(51) | 10164227-0305A1RLF |
| J300 | 80 | DF40HC(3.5)-80DS-0.4V(51) | 10164227-0805A1RLF* |
Nota sobre la altura del conector de acoplamiento
El conector de altura 3.5mm se usa para la configuración predeterminada; sin embargo, dependiendo de las necesidades del usuario final, se puede usar una altura de conector diferente. Es posible pedir la placa sin buzzer ni ranura para tarjeta SD, permitiendo un footprint más compacto.
Una tabla de pinout completa está disponible a continuación. La tabla sigue el diseño físico de los conectores, con dos pines por fila. Si usas KiCad para capturar tu diseño, puedes descargar el proyecto de plantilla desde nuestra sección de descargas.
Herramienta de pinout
J100
| Grupo | Nombre | Pin | Pin | Nombre | Grupo |
|---|---|---|---|---|---|
| POWER | GND | 1 | 2 | USART2_TX | SG1 |
| USB | USB_DM | 3 | 4 | USART2_RX | SG1 |
| USB | USB_DP | 5 | 6 | USART2_CTS | SG1 |
| POWER | GND | 7 | 8 | USART2_RTS | SG1 |
| SDMMC | SD_DET | 9 | 10 | GND | POWER |
| SDMMC | SDIO_D1 | 11 | 12 | UART4_TX | SG2 |
| SDMMC | SDIO_D0 | 13 | 14 | UART4_RX | SG2 |
| SDMMC | SDIO_CK | 15 | 16 | UART4_CTS | SG2 |
| POWER | GND | 17 | 18 | UART4_RTS | SG2 |
| SDMMC | SDIO_CMD | 19 | 20 | GND | POWER |
| SDMMC | SDIO_D3 | 21 | 22 | USART3_TX | SG4 |
| SDMMC | SDIO_D2 | 23 | 24 | USART3_RX | SG4 |
| POWER | GND | 25 | 26 | GND | POWER |
| MISC | ALARM | 27 | 28 | USART1_TX | SG5 |
| POWER | GND | 29 | 30 | USART1_RX | SG5 |
J200
| Grupo | Nombre | Pin | Pin | Nombre | Grupo |
|---|---|---|---|---|---|
| SWD | SWCLK | 1 | 2 | USART6_TX | SG6 |
| SWD | SWDIO | 3 | 4 | USART6_RX | SG6 |
| POWER | GND | 5 | 6 | RESERVADO | - |
| - | AP_nRST | 7 | 8 | RESERVADO | - |
| - | BOOT0 | 9 | 10 | GND | POWER |
| POWER | GND | 11 | 12 | RESERVADO | - |
| FDCAN | FDCAN1_5V | 13 | 14 | RESERVADO | - |
| FDCAN | FDCAN1_H | 15 | 16 | GND | POWER |
| FDCAN | FDCAN1_L | 17 | 18 | ADDR_LED | MISC |
| POWER | GND | 19 | 20 | RESERVADO | - |
| - | BRD_EN | 21 | 22 | SPI_SCK | SPI |
| POWER | 5V_PWRIN1 | 23 | 24 | SPI_SDI | SPI |
| POWER | 5V_PWRIN1 | 25 | 26 | SPI_SDO | SPI |
| POWER | GND | 27 | 28 | SPI_nCS | SPI |
| POWER | GND | 29 | 30 | RESERVADO | - |
J300
| Grupo | Nombre | Pin | Pin | Nombre | Grupo |
|---|---|---|---|---|---|
| POWER | GND | 1 | 2 | GND | POWER |
| FDCAN | FDCAN2_L | 3 | 4 | GND | POWER |
| FDCAN | FDCAN2_H | 5 | 6 | 5V_PWRIN2 | POWER |
| FDCAN | FDCAN2_5V | 7 | 8 | 5V_PWRIN2 | POWER |
| POWER | GND | 9 | 10 | 3V3_AP | POWER |
| - | RESERVADO | 11 | 12 | RESERVADO | - |
| - | RESERVADO | 13 | 14 | RESERVADO | - |
| POWER | GND | 15 | 16 | RESERVADO | - |
| - | RESERVADO | 17 | 18 | RESERVADO | - |
| - | RESERVADO | 19 | 20 | GND | POWER |
| POWER | GND | 21 | 22 | RESERVADO | - |
| I2C | I2C2_SDA | 23 | 24 | RESERVADO | - |
| I2C | I2C2_SCL | 25 | 26 | GND | - |
| POWER | GND | 27 | 28 | ADC1_INP10 | ADC |
| I2C | I2C1_SDA | 29 | 30 | ADC1_INP4 | ADC |
| I2C | I2C1_SCL | 31 | 32 | GND | POWER |
| POWER | GND | 33 | 34 | RESERVADO | - |
| SG7 | UART5_RX | 35 | 36 | RESERVADO | - |
| SG7 | UART5_TX | 37 | 38 | RESERVADO | - |
| POWER | GND | 39 | 40 | RESERVADO | - |
| SG3 | UART7_RTS | 41 | 42 | GND | POWER |
| SG3 | UART7_CTS | 43 | 44 | GP4 | GPIO |
| SG3 | UART7_RX | 45 | 46 | GP3 | GPIO |
| SG3 | UART7_TX | 47 | 48 | GP2 | GPIO |
| - | RESERVADO | 49 | 50 | GP1 | GPIO |
| - | RESERVADO | 51 | 52 | GND | POWER |
| POWER | GND | 53 | 54 | CH12 | MOT/GPIO |
| - | RESERVADO | 55 | 56 | CH11 | MOT/GPIO |
| POWER | GND | 57 | 58 | CH10 | MOT/GPIO |
| - | RESERVADO | 59 | 60 | CH9 | MOT/GPIO |
| - | RESERVADO | 61 | 62 | GND | POWER |
| - | RESERVADO | 63 | 64 | CH8 | MOT/GPIO |
| POWER | GND | 65 | 66 | CH7 | MOT/GPIO |
| - | RESERVADO | 67 | 68 | CH6 | MOT/GPIO |
| POWER | GND | 69 | 70 | CH5 | MOT/GPIO |
| - | RESERVADO | 71 | 72 | GND | POWER |
| - | RESERVADO | 73 | 74 | CH4 | MOT/GPIO |
| POWER | GND | 75 | 76 | CH3 | MOT/GPIO |
| - | RESERVADO | 77 | 78 | CH2 | MOT/GPIO |
| - | RESERVADO | 79 | 80 | CH1 | MOT/GPIO |
Puertos seriales
Sección titulada «Puertos seriales»Para mayor comodidad, los puertos seriales se agrupan en SG1, SG2, SG3, SG4, SG5, SG6 y SG7. Estas son designaciones arbitrarias, pero coinciden con el nombre del proyecto de plantilla y las definiciones de firmware.
| Grupo serial | Ubicación | Periférico STM32 | Parámetro AP Serial | Control de flujo | Función AP predeterminada |
|---|---|---|---|---|---|
| SG1 | J100 | USART2 | SERIAL1_* | SÍ | TELEM1 |
| SG2 | J100 | UART4 | SERIAL2_* | SÍ | TELEM2 |
| SG3 | J300 | UART7 | SERIAL6_* | SÍ | N/A (USUARIO) |
| SG4 | J100 | USART3 | SERIAL4_* | NO | GPS2 |
| SG5 | J100 | USART1 | SERIAL7_* | NO | N/A (USUARIO) |
| SG6 | J200 | USART6 | SERIAL5_* | NO | ELRS RX (USUARIO) |
| SG7 | J300 | UART8 | SERIAL3_* | NO | GPS |
¿Qué es la “Función AP predeterminada”?
Ardupilot asigna una función predeterminada a los primeros 5 puertos seriales según la siguiente tabla. Para más información, consulta la wiki de Ardupilot aquí.
Inicio rápido
Sección titulada «Inicio rápido»Instala la placa en su portadora y conecta vía USB para comenzar a configurar parámetros y conectar periféricos.
La placa viene con Ardupilot Copter dev o stable preinstalado de fábrica. Sin embargo, el bootloader también ofrece interoperabilidad con PX4, por lo que QGC podrá detectarlo y cargar el firmware adecuadamente. No es necesario cambiar el bootloader si quieres flashear PX4. Para más información, consulta nuestra guía de actualización de firmware.
Recomendamos a todos los clientes ejecutar la última versión indicada disponible en la tabla de compatibilidad a continuación para su flight stack preferido.
Firmware compatible
Sección titulada «Firmware compatible»El 3DR Control N1 es compatible con el siguiente firmware:
ArduPilot
Sección titulada «ArduPilot»Pendiente.
Pendiente.
Algunos recursos adicionales:
Sobre los coprocesadores IO y los pines AUX
Históricamente, los microcontroladores montados en los Autopilots no tenían suficientes recursos para manejar los requisitos que la industria demandaba. Normalmente, las características necesarias para mantenerse al día con las tendencias empujaron a los fabricantes a agregar coprocesadores IO para aumentar el número de timers disponibles para generar y decodificar señales PWM y pines IO adicionales. El coprocesador en estas arquitecturas de hardware generalmente está conectado a través de un único puerto serial, reduciendo la cantidad de datos disponibles en el tiempo e introduciendo puntos de falla. Este esquema obligó a dividir los pines entre MAIN y AUX, donde MAIN son los pines conectados al MCU y AUX a los coprocesadores IO. Sin embargo, generaciones posteriores de hardware han aumentado considerablemente la densidad de pines IO, así como el número de timers, entre otras mejoras. Un beneficio especial destaca para nuestros principios de diseño: la mayor cantidad y más sofisticados DMAs que funcionan muy bien con periféricos, transfiriendo grandes cantidades de datos y reduciendo el uso de CPU. Además, estamos transitando de una arquitectura de MCU único a sistemas más distribuidos gracias a DroneCAN y conectividad Ethernet (próximamente). En términos prácticos, puedes considerar cada pin PWM disponible en tu placa como lo harías con un pin AUX.
Opciones de pedido disponibles
Sección titulada «Opciones de pedido disponibles»Niveles de producto Control N1
Sección titulada «Niveles de producto Control N1»| Nivel | Personal/Tinkerer | Industrial/Empresarial | Partner/OEM |
|---|---|---|---|
| Soporte | Comunidad | Respuesta en 1 o 2 días hábiles | Todo en Empresarial Logo personalizado o sin logo Sensores personalizados BL firmado personalizado |
| Bootloader | Abierto | Firmado (o abierto) | |
| Firmware | Flight stacks upstream - PX4 y Ardupilot | Binarios probados, distribuidos por 3DR | |
| Calibración | Del proveedor de IMU | Calibrado en fábrica en todo el rango de temperatura tras el ensamblaje Informes de prueba Ciclo térmico | |
| Sensores | Estándar | Mejorado | |
| Precio | $99 | $149 a $549 | Contáctanos |
| Opciones personalizadas | Descripción |
|---|---|
| Recubrimiento conformal | Opcional |
| Calibración térmica | Opcional |
| Ultra bajo perfil (sin ranura SD ni buzzer) | Aplica MOQ |